使用するインホイールモータ
Amazonで売っている10インチの電動キックボード用のインホイールモータを使用することとした.理由としては安いから.それ以上でもそれ以下でもないです.
https://amzn.to/4c4vPAg
このモータを制御するのに十分なモータドライバを設計していくこととする.
モータの電気的仕様
Amazonの販売サイトからわかるものと独自に調べたものが以下の通り.わからないことだらけ.
駆動電圧:24V
定格電力:350W
ホールセンサ:15 PPR(30くらいあってほしかった)
BLDCモータドライバ設計仕様
当初,Amazonで販売しているモータドライバを使用する予定だったが,使ってみると回転が不安定….インターネットで調べてみると,結構な割合で不良品らしい(参考:https://zenn.dev/ch1h160/articles/d59641c3bbe7b1)ことが分かったので,独自に開発することとした.
設計仕様はざっくりと以下のように定義
電圧:24 V(モータが24Vだから+今回使用する予定のバッテリが\(12 \times 2=24\) Vだから)
電力:500W(モータ定格の1.5倍くらいあれば十分でしょ)
最大周囲温度:50 ℃(真夏のロボットの密封された場所に設置されるからそんなもん?)
インターフェース:CAN(かっこよさそう)
速度制御:3つのハーフブリッジによる制御(これ以外の方法があるのか?)
インターフェースをCANにする理由として,通信ラインの管理が楽.増設が簡単にできる.
UARTとかで通信するより,エラー処理とかしっかりしてるのでそちらのほうがよさそう(たぶん).
部品は,秋月電子を基本として入手可能な部品として,秋月電子では入手困難な部品についてはDigikey,Amazonで入手できるようにする.
上記BLDCモータドライバを設計するにあたり,下記の電子部品等を選定していく
・マイコン
・パワーMOS-FET
・ショットキーバリアダイオード
・ゲートドライブIC
・ファイスリカバリダイオード
・放熱器
・抵抗とコンデンサetc …
マイコンの選定
これまでに,H8,R8C,RXマイコン,STM32マイコンを扱ってきたことがあるので,それらの中から選ぶ.ざっと,マイコンに求める機能は以下の通り.
・HサイドFETの駆動はPWM,LサイドFETはディジタルアウトプット(PWM:3本,Digital Output:3本)
・ホールセンサ入力(Digital Input:3本)
・通信インターフェース(RX,TX:1本ずつ)
・ロータリーエンコーダを増設するかもしれない(タイマーA相,B相:1本ずつ,Digital Input:1本)
・電流センシングしときたい(ADC:1本)
・電圧センシングしときたい(ADC:1本)
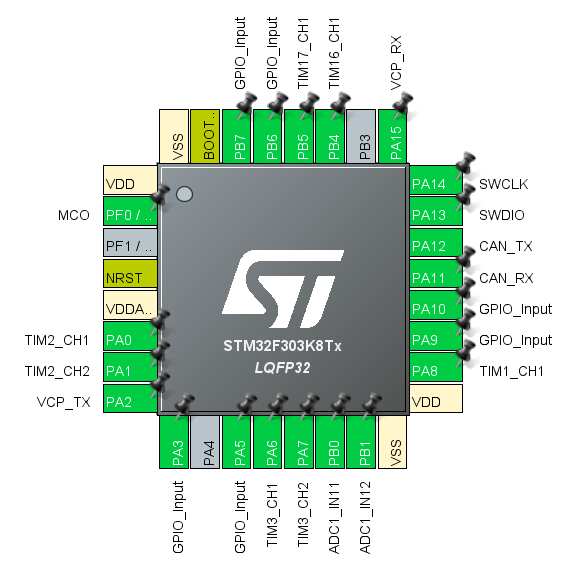
ざっと,これらを満たして,比較的安価なマイコンを探したところ,Nucleo32 STM32F303K8があったので,こちらを使用マイコンとして選定.
個人的にSTM32マイコンは高性能なのに比較的安価なのでおすすめ.大学とかであれば,無償提供してもらうこともできます.
ぜひ,興味のある方はぜひ活用してみてください.
ちなみに,今回選定したマイコンでは,GPIOが少し余るので,ジャンパピンでCANのIDを変更できるようにしようかなとか思ったりしています.ピン配はこんな感じ.
今後の予定
ひとまず,ここまでで疲れたので終了.
今後はFETなどの電子部品たちの選定をやっていきます(たぶん).