位置推定に失敗した場合の復帰手法に関して
自己位置推定において、タイヤの滑りによる誤差の蓄積などといったなんらかの理由で現在の自己位置を見失ってしまうことがある。そこで、現在の自己位置を見失った際の復帰を行いたい。
Bag of features
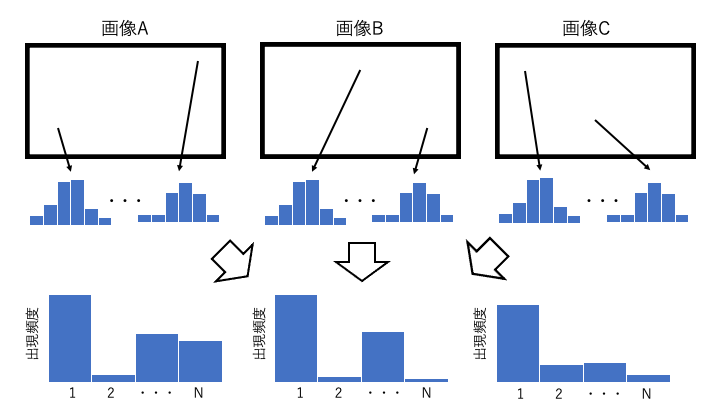
Bag-of-featuresは、文書分類手法であるBag-of-wordsを画像に適応した手法であり、Bag-of-wordsで文章を単語の集合と見なし、単語の語順を無視してその頻度で文書の分類を行うのと同様に、画像を局所特徴量の集合と見なし、その位置情報を無視して画像を認識する。
Bag of featuresを用いることで場所の候補を求めることができるため、候補を求めた後はICPなどのスキャンマッチングにより自己位置の推定を行うことができると考えられる。
永橋知行, 伊原有仁, & 藤吉弘亘. (2009). 画像分類における Bag-of-features による識別に有効な特徴量の傾向. 研究報告コンピュータビジョンとイメージメディア (CVIM), 2009(3), 1-8.
ランドマークによる探索
位置推定に失敗してしまった場合に復帰する手法として、過去に訪問した点をランドマークとして記憶しておく方法があります。このような点はキーフレームとも呼ばれます。ランドマークを探索する場合はなんらか特徴量をインデックス化しておき、高速に走査できるようにしておきます。
SLAMとは? これだけは知っておきたい3つのこと
SLAMとは? – これだけは知っておきたい3つのこと – MATLAB & Simulink (mathworks.com)
ディープラーニング
上記の手法のほかに、ディープラーニングを用いた手法が考えられる。ロボットに、座標や見えている角度など何らかの情報をあらかじめ与えておき、移動後の画像との相違点を抽出することで、学習に基づいた自己位置の推定ができると考えられる。また、ディープラーニングを用いた位置推定の正誤判断による自己位置の推定も可能だと考えられる。
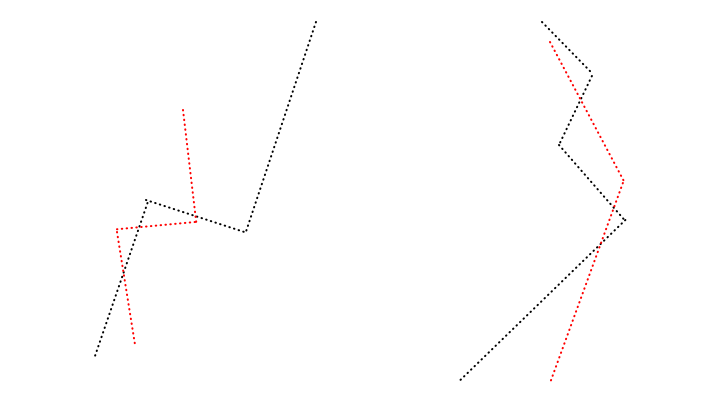
上図において、黒は占有格子地図に記録された障害物、赤はレーザースキャンである。人目で見ればこれらのずれは明らかで位置推定が失敗していると判断できる。このようなデータをCNNに入力し、位置推定の正誤判定を行う。
北海道大学 大学院情報科学院 / 大学院情報科学研究院
https://www.ist.hokudai.ac.jp/netjournal/net_53_1.html
自己位置推定結果の信頼度を推定する
https://qiita.com/NaokiAkai/items/f1093aad39da0a83f820
復帰手法の比較
位置推定に失敗した場合の復帰手法について、Bag of features とディープラーニングでは高精度な位置推定が期待できる。しかし、Bag of featuresでは特徴量をベースとした学習を行う必要があることや、特徴量検出のアルゴリズムに依存する問題がある。また、ディープラーニングでは高精度な予測を行うために大量のデータの学習を必要とする。また、大量のデータを処理するためのGPUが必要となる。一方で、ランドマークを用いた復帰手法では、ランドマークに誤差が生じ、誤差の累積によるズレも想定されるが、データの学習を行う必要はない。すなわち、これらの復帰手法の大きな違いは学習の有無である。当然、高精度な位置推定は望ましいためBag of featuresやディープラーニングが有力であるが、大量のデータ学習、データ処理などかなりコストがかかると想定される。そのため、つくばチャレンジにおける自己位置の復帰手法としては、過去の訪問点をランドマークとして記憶しておき、インデックス化した特徴量を走査することによる復帰が有力なのではないだろうか。そして、ランドマークに生じる誤差の累積によるズレをいかに最小化できるかが重要となるだろう。
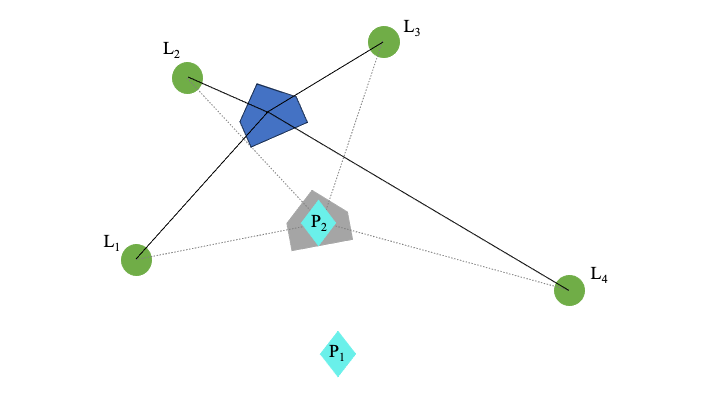
復帰手法の想定
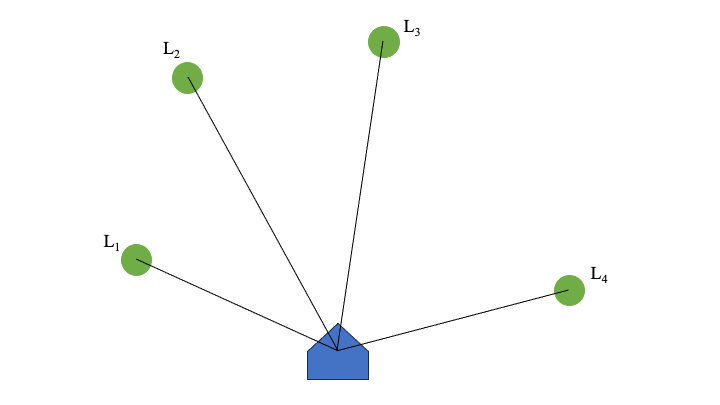
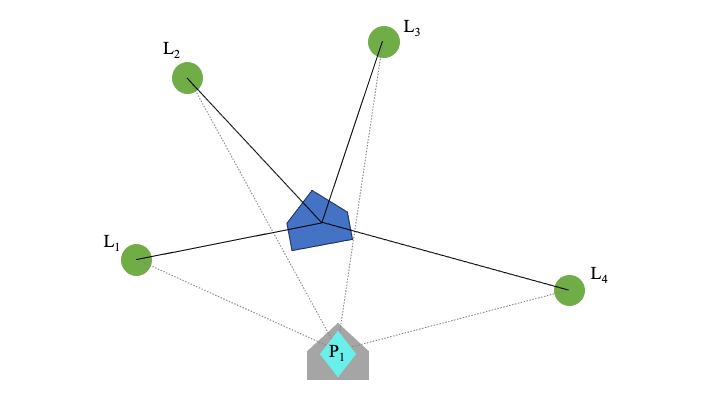
上図はランドマークによる復帰手法の想定であり、Liはランドマーク、Piは訪問点を示す。
今後は、ランドマーク探索における高速走査手法の検討、およびインデックス化する特徴量についての検討、ランドマークに生じた誤差の累積によるズレの最小化を行っていきたい。