インデックス化する特徴量について
#1では、ランドマークを探索することで復帰する手法を提案した。ランドマークには、特徴量がはっきりとしているLiDARで取得した点群などが考えられる。そこで、LiDARで取得した点群に加え、過去の訪問点を用いて自己位置の復帰を目指す。
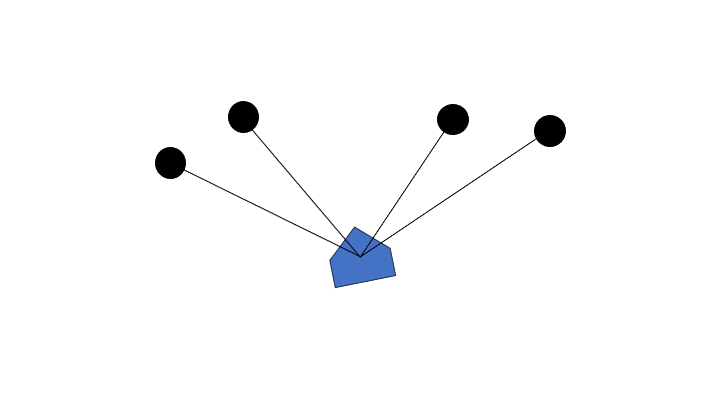
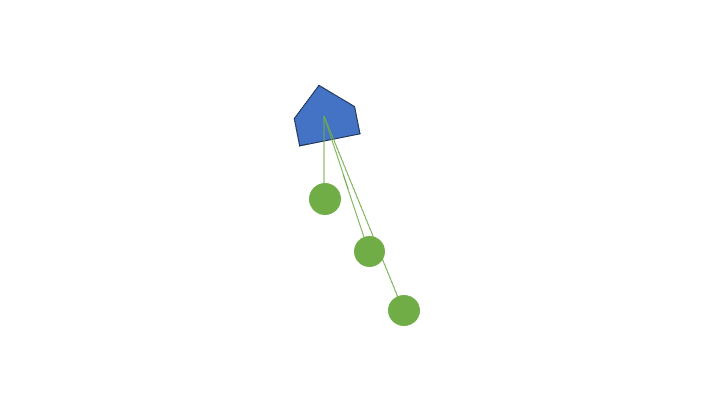
黒点はLiDARで取得した点群情報、緑点は過去の訪問点である。本来、これらは別々に取得したものであり、点群情報をランドマークとして扱うが、本復帰法では、点群情報に加え、過去の訪問点もランドマークとして扱うこととする。
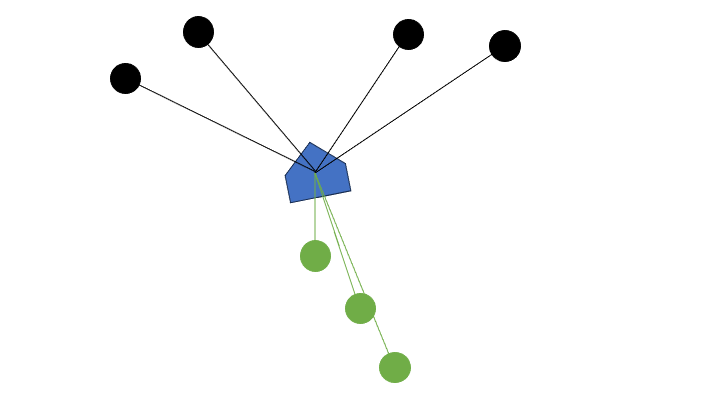
これらのランドマークをインデックス化し、自己位置をロストした際には、両ランドマークを探査し、位置関係および座標変化から現在位置を割り出す。これにより、どちらか一方だけの情報のみに依存せず、より正確に自己位置の復帰ができるのではないかと考える。この手法では、LiDARで取得する点群情報が更新され続けるように、ランドマークとして扱う訪問点も常に更新する必要がある。それに伴い、ランドマークとする訪問点との位置関係を常に計算する必要があり、どれぐらいの訪問点をランドマークとして扱うべきであるかを検討する必要がある。